INSTALL
INTRO
In order to facilitate a customizable and portable version of the keyboard interface one must include this package for the use of pushing velocity commands via their keyboard.
This guide assumes three things:
The husky_ws is setup using the previous step and the .bashrc has been setup properly for said workstation
SETUP
Navigate to the husky_kinetic workstation
`cd ~/Documents/husky_kinetic/src`Clone the github repository using the code below
`git clone -b Control-Mapping https://github.com/CSUN-SERL/Tutorials.git custom_keyboard_interface`Move to the source space
`cd ..`Build said package using catkin make
`catkin_make`Re-execute the source command in order for the new package to be recognized
`source ~/Documents/husky_kinetic/devel/setup.bash`Run _rospack _to verify the new packages are installed and visible
`rospack find custom_keyboard_interface`Install configparser
`pip install configparser`
Usage
Run roscore
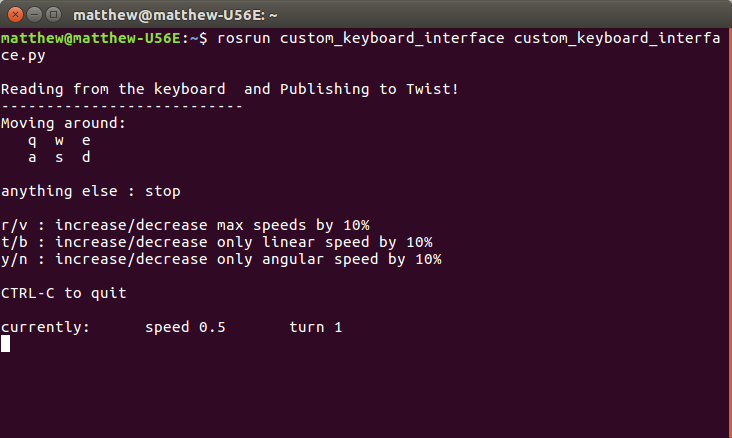
roscoreRun the below command:
`rosrun custom_keyboard_interface custom_keyboard_interface.py`You should see the below window:
Customization
By default the implementation uses the wasd configuration. In order to customize the commands we've included an .ini file that can be used to customize said controls. This should be titled config.ini.