Testing Depth Calculation
To test depth calculations, we ran a rosbag containing point clouds produced from a stereo camera setup in Gazebo. The cameras were looking at a model of a human.
The following is a picture of what the system was detecting, as well as the log entry saved for the detection.
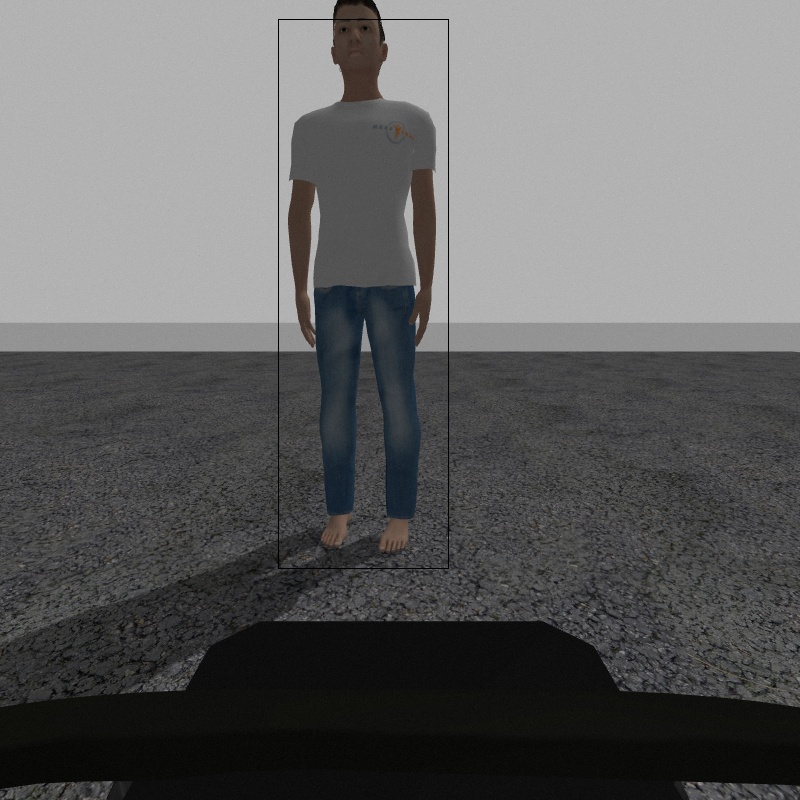

Currently, the depth is meaningless since it needs to be configured for a given camera setup, and we do not know the details of the setup of the Gazebo cameras. However, this demonstrates that the system is in fact working correctly. More log entries were made, and all were about the same depth.